Como Resolver Problemas de Agendamento e Roteamento com AI Planning
Quando o problema é 'faz essas coisas na ordem certa', você quer um planejador, não um LLM.

Quando o problema é 'faz essas coisas na ordem certa', você quer um planejador, não um LLM.
Se sua equipe vive travando em decisões de agendamento, roteamento ou sequência de tarefas, este post é um ótimo ponto de partida: AI Planning transforma restrições reais em um plano executável, sem depender de tentativa e erro.
Para esse tipo de problema, o caminho costuma ser um planejador, não machine learning e não LLM de propósito geral.
Pense numa empresa de entregas decidindo quais paradas fazer e em qual ordem, um hospital organizando tratamentos ao redor dos medicamentos de um paciente, ou uma fábrica sequenciando jobs numa máquina compartilhada. Todos têm o mesmo formato: um estado inicial, um objetivo, ações que você pode tomar e regras que proíbem certas combinações. Você descreve isso para um planejador, e ele te devolve uma sequência válida de ações.
Este post cobre o básico e um exemplo pequeno que você pode adaptar para o seu caso.
Um planejador é um solver genérico. Ele não sabe qual é o seu problema. Ele só conhece três coisas: o estado em que o mundo está, as ações que podem mudar esse estado (e as regras para quando cada ação é permitida), e o objetivo que você quer atingir.
Descreva o problema dessa forma e o planejador resolve, seja roteando um robô por uma grade, escalonando cirurgias em salas de operação, ou sequenciando jobs numa fábrica. Os nomes mudam. O planejador não liga.
O trabalho do seu lado é traduzir o problema real para estados, ações e um objetivo. Uma vez escrito, trocar de problema é só trocar de arquivo. O planejador continua o mesmo.
A Planning Domain Definition Language (PDDL) é o formato que a maioria dos planejadores lê. Você escreve dois arquivos:
Qualquer planejador que lê PDDL pode, em princípio, resolver qualquer problema que você escrever nele. Na prática, o suporte varia. Planejadores mais antigos podem não lidar com PDDL 3, e os mais novos às vezes deixam de fora partes do PDDL 2.1. Escolha o planejador compatível com os recursos que você precisa.
Vou usar o LAMA, um planejador feito para problemas reais. Ele usa busca heurística progressiva com marcos e um A* com peso progressivo. O artigo completo está aqui.
O jeito mais fácil é o planutils, um toolkit Linux pra rodar e testar planejadores. O README deles tem os passos de instalação.
Um robô numa grade pequena precisa ir da célula 1 até a célula 5. A célula 3 está bloqueada, então o caminho válido é 1, 2, 4, 5.
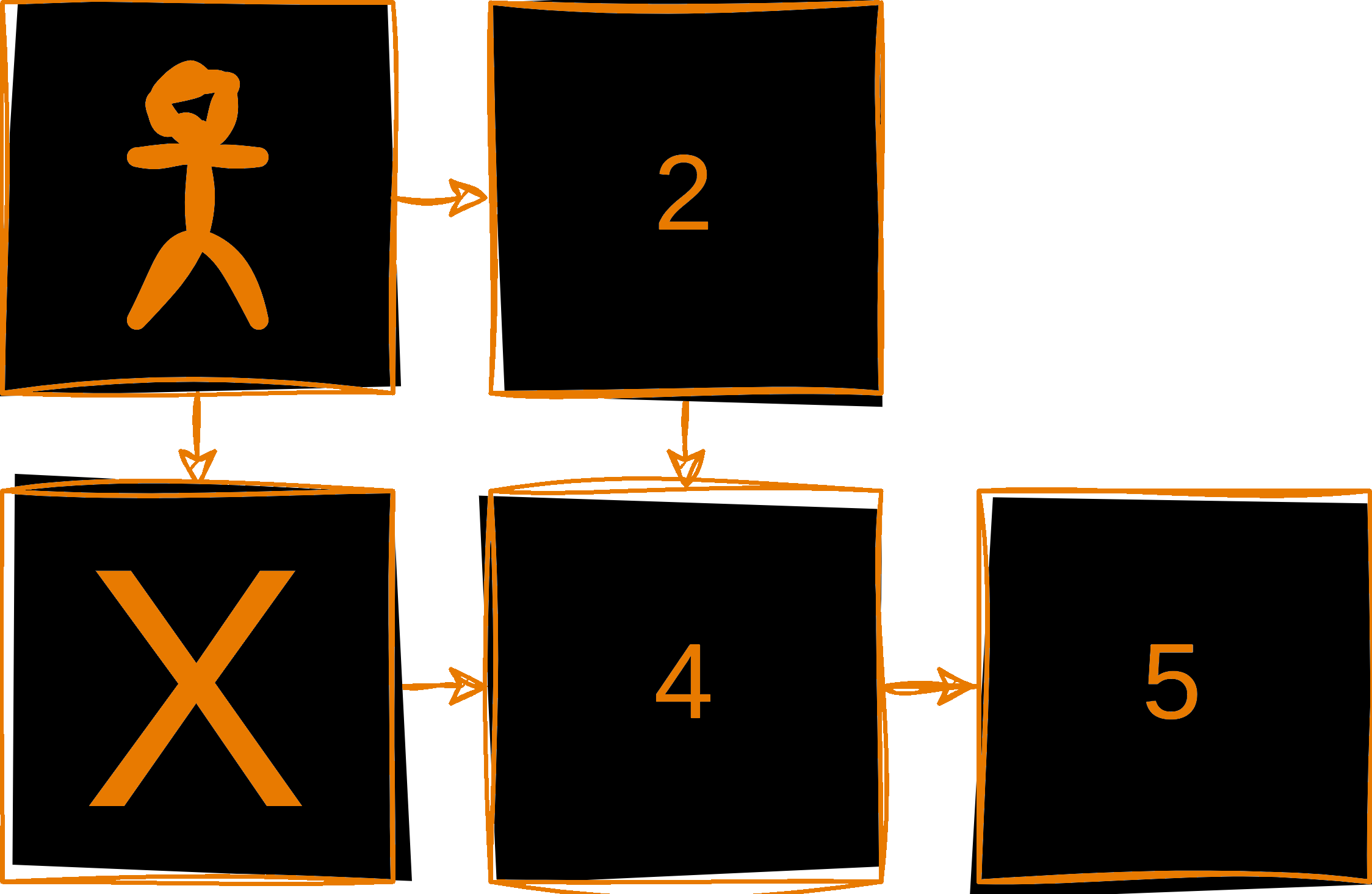
Isso é trivial de propósito. O importante é a estrutura, não o quebra-cabeça. A mesma estrutura serve pra roteamento de entregas, escalonamento de jobs e automação de workflows. É só mudar o que os objetos e ações significam.
Você descreve objetos, predicados e ações. Objetos são as coisas do seu mundo (aqui, robôs e locais). Predicados são fatos que podem ser verdadeiros ou falsos: onde o robô está, quais células estão bloqueadas, quais são adjacentes. Ações são o que o robô pode fazer, com pré-condições (coisas que precisam ser verdade antes de a ação rodar) e efeitos (o que muda depois).
(define (domain robot)
(:requirements :strips :typing)
(:types robot location)
(:predicates
(at ?r - robot ?l - location)
(blocked ?l - location)
(adjacent ?l1 ?l2 - location)
)
(:action move-up
:parameters (?r - robot ?l1 - location ?l2 - location)
:precondition (and (at ?r ?l1) (adjacent ?l1 ?l2))
:effect (and (at ?r ?l2) (not (at ?r ?l1))))
(:action move-down
:parameters (?r - robot ?l1 - location ?l2 - location)
:precondition (and (at ?r ?l1) (adjacent ?l1 ?l2))
:effect (and (at ?r ?l2) (not (at ?r ?l1))))
(:action move-left
:parameters (?r - robot ?l1 - location ?l2 - location)
:precondition (and (at ?r ?l1) (adjacent ?l1 ?l2))
:effect (and (at ?r ?l2) (not (at ?r ?l1))))
(:action move-right
:parameters (?r - robot ?l1 - location ?l2 - location)
:precondition (and (at ?r ?l1) (adjacent ?l1 ?l2))
:effect (and (at ?r ?l2) (not (at ?r ?l1)))))
O arquivo de problema fixa o caso específico: os objetos que existem, onde o robô começa e o objetivo.
(define (problem robot)
(:domain robot)
(:objects
robot1 - robot
box1 box2 box3 box4 box5 - location
)
(:init
(at robot1 box1)
(blocked box3)
(adjacent box1 box2)
(adjacent box1 box3)
(adjacent box2 box4)
(adjacent box3 box4)
(adjacent box4 box5)
)
(:goal (at robot1 box5))
)
Lê assim: "Um robô, cinco células. O robô começa na box1. A box3 está bloqueada. Aqui estão quais box são adjacentes. Leve o robô até a box5."
lama domain.pddl problem.pddl
O LAMA imprime um plano válido, ou avisa que não existe solução.
(move-down robot1 box1 box2)
(move-down robot1 box2 box4)
(move-down robot1 box4 box5)
; cost = 3 (unit cost)
Aqui tem um robô e um objetivo, mas o mesmo domínio escala pra vários robôs com objetivos separados.
Pegue o problema que você realmente tem e responda quatro perguntas:
Se você consegue responder isso, você consegue escrever um arquivo PDDL. E se consegue escrever o PDDL, um planejador consegue resolver.
A International Planning Competition publica problemas de referência se você quiser ver como são domínios mais difíceis.
Alguns planejadores também suportam planejamento numérico, com variáveis pra coisas como custo, tempo, combustível ou capacidade. Isso é útil quando chegar ao objetivo não basta e você também precisa minimizar alguma coisa. Logística e escalonamento costumam precisar.
Se o seu problema é sequenciamento com restrições duras, use planejador. Ele te dá planos válidos, que você consegue inspecionar, testar e melhorar. LLM é outra ferramenta, para outra classe de problema.
Veja também:
Precisa de ajuda com isso?
Pesquisamos, construímos um protótipo e entregamos um plano técnico pra você decidir o próximo passo.